性能优点
设备特点:
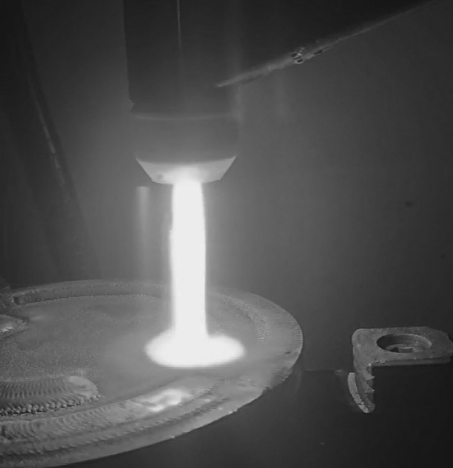
(1)一体化控制:焊机,送粉,维弧,主弧,电流,送粉量,行走等全部人机界面控制.方便操作.只需空走一圈,扫描记忆旋转过程中密封面位置变化即可输入焊接参数一键启动操作.
(2)精密机械结构:变位机旋转采用精密涡轮减速机,减速机间隙8弧分,防止在旋转熔覆过程中因重力原因产生的回转,导致熔覆面不平整.
(3)探测扫描系统:改进了传统的点坐标输入的方法,传统的方法需要输入较多的旋转密封面的坐标,且会产生位移误差,导致熔覆位置偏差.现有的探测扫描,记忆准确,行走精准,保证了密封面熔覆的一致性.
(4)远程遥控控制,方便对枪,焊接过程中微调.
适用产品:
三偏心蝶阀
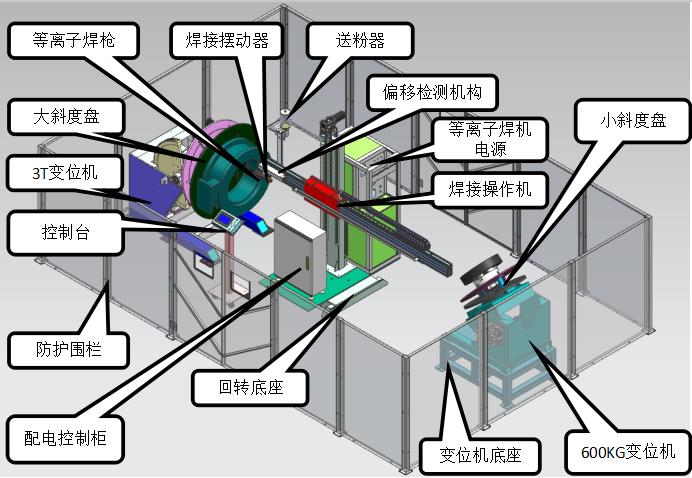
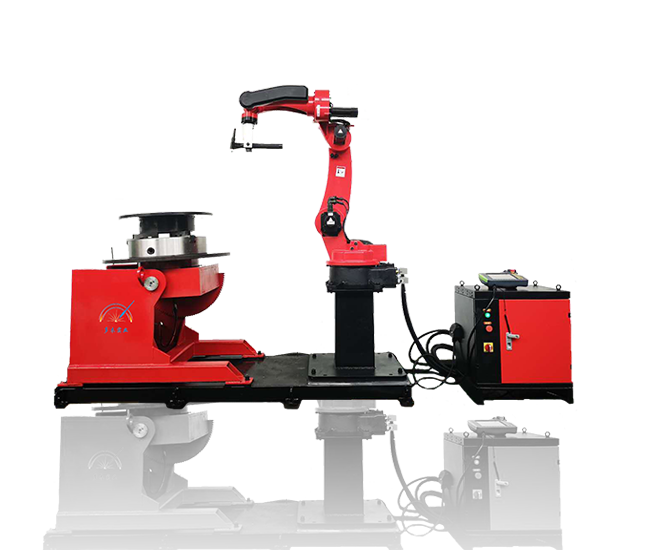
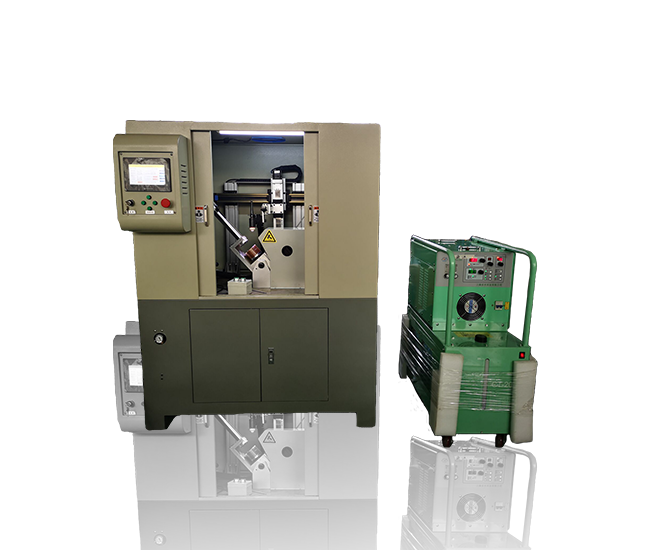
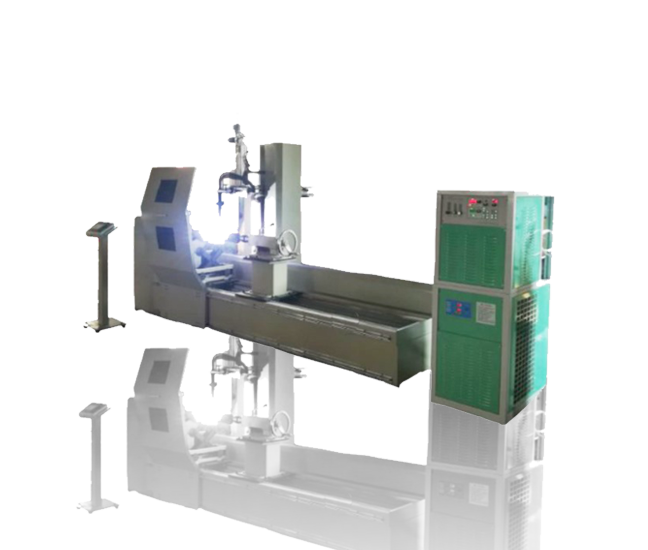
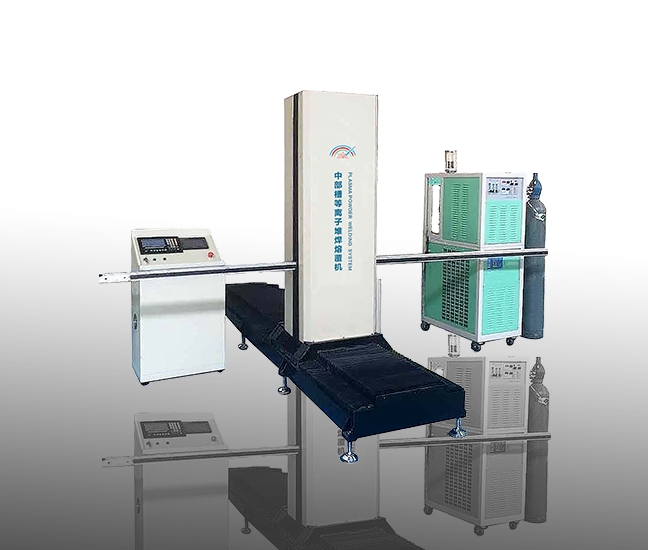
设备组成
本设备由焊接操作机、焊接变位机、电器控制柜、等离子粉末堆焊机等部分组成,各组成部分联动实现自动化堆焊。由于偏心蝶阀的堆焊面的边界为不规则曲线,所以本套方案采用数控系统,通过编程控制焊枪的行走轨迹,实现与阀门堆焊面的吻合。同时本套设备还可用于其他产品的圆形端面堆焊、外圆堆焊、内孔堆焊等,适用于阀门、轴、轧辊等多种产品的堆焊。
系统配置
|
序号 |
项目名称 |
规格型号 |
数量 |
备注 |
|
1 |
焊接操作机 |
DLH1500 |
1 |
|
|
2 |
焊接变位机 |
DHB-15 |
1 |
|
|
3 |
控制系统
(数控系统+PLC) |
Starfire |
1 |
|
|
三菱PLC |
1 |
|
4 |
液晶触摸屏 |
WEINVIEW |
1 |
|
|
5 |
电器控制柜 |
自制 |
1 |
|
|
6 |
移动控制台 |
自制 |
1 |
|
|
7 |
焊接摆动器 |
自制 |
1 |
|
主要部件详细配置
|
项目名称 |
焊接操作机 |
|
横臂行程 |
1200mm |
|
升降高度 |
1000mm |
|
横臂电机 |
伺服电机 |
|
升降电机 |
伺服电机 |
|
项目名称 |
焊接变位机 |
|
额定承载总量 |
1200Kg |
|
转盘速度 |
小于0.5r/min |
|
转盘齿轮 |
回转支撑 |
|
主轴电机 |
伺服电机 |
|
主轴减速机 |
行星减速机 |
|
翻转电机 |
伺服电机 |
|
翻转减速机 |
双减速 |
|
翻转角度 |
120° |
|
项目名称 |
焊接摆动器 |
|
摆幅 |
0-80mm |
|
摆动速度 |
0-30mm/s |
|
两端停顿时间 |
0-2s |
|
载荷 |
15kg |